Marta Llompart Modeling For Various Brands Set 4
Carla Ossa - Modeling for various brands 2015 Set 6 Girls
Posted by guasman at Jan. 18, 2017

Carla Ossa - Modeling for various brands 2015 Set 6
100 JPG | up to 2559x3740 | 49 mb
Colombian model
100 JPG | up to 2559x3740 | 49 mb
Colombian model
Vectors - Various Women Set 4 Graphics
Posted by posterb at May 27, 2019

Photos - Various Seafood Set 4 Graphics
Posted by posterb at Nov. 8, 2017

Vectors - Various Cocktails Set 4 Graphics
Posted by posterb at March 15, 2018
Rachel Cook in bikini for PacSun 2017 set 4 Girls
Posted by ringman at Sept. 10, 2017

Identification, Knowledge Engineering and Digital Modeling for Adaptive and Intelligent Control eBooks & eLearning
Posted by AvaxGenius at July 30, 2023
Identification, Knowledge Engineering and Digital Modeling for Adaptive and Intelligent Control by Natalia Bakhtadze, Igor Yadykin, Andrei Torgashov et al
English | PDF | 2023 | 262 Pages | ISBN : N/A | 14.2 MB
Starting our work on this Special Issue, we assumed that the research results presented here would reflect the solutions to various problems related to production management; however, the set of identified problems showed that their solutions could be useful for a wider range of applications. Therefore, we have presented 14 articles covering various aspects of the new trends in adaptive and intelligent control and identification.
Aquaveo Watershed Modeling System (WMS) 11.2.4 Software
Posted by scutter at Aug. 20, 2023
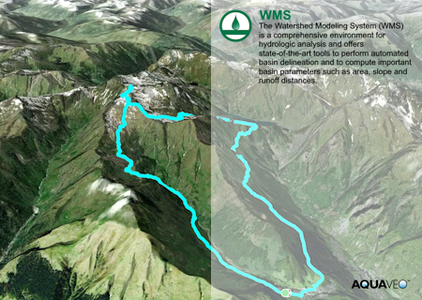
Aquaveo Watershed Modeling System (WMS) 11.2.4 | 4.9 Gb
Aquaveo, a water resources consulting company, is pleased to announce availability Watershed Modeling System (WMS) 11.2.4 is a complete watershed solution used for automated delineation, hydrologic & hydraulic modeling, floodplain mapping, and storm drain modeling.
V.A. - Natural Dreams - Music For Relaxation (Box Set 10CD,1999) Music
Posted by Discograf_man at Sept. 24, 2018
V.A. - Natural Dreams - Music For Relaxation (Box Set 10CD,1999)
FLAC (*tracks+.cue+log) | Run Time: 10:17:44 | 3.59 Gb
Genre: New Age, Meditative, Instrumental, Relax | Label: Hey Presto!
FLAC (*tracks+.cue+log) | Run Time: 10:17:44 | 3.59 Gb
Genre: New Age, Meditative, Instrumental, Relax | Label: Hey Presto!
Fantastic box set of relaxing music and sounds.Great for yoga/meditation as well as studying and chilling out. Superbly calming and mood lightening. 10 discs, every one has relaxing music of various genres. Some are jazzier than others, some have more or less nature sounds that others, but these 10 hours are in a playlist all their own on my PC and I love it!
Introduction to Blender and 3D Modeling for Beginners eBooks & eLearning
Posted by lucky_aut at Aug. 13, 2024

Introduction to Blender and 3D Modeling for Beginners
Published 8/2024
Duration: 6h34m | .MP4 1280x720, 30 fps(r) | AAC, 44100 Hz, 2ch | 4.84 GB
Genre: eLearning | Language: English
Published 8/2024
Duration: 6h34m | .MP4 1280x720, 30 fps(r) | AAC, 44100 Hz, 2ch | 4.84 GB
Genre: eLearning | Language: English
The best starter guide on how to use Blender and learn 3D Modeling by creating a Toy Train and a Chess Set.
Vehicle-Manipulator Systems: Modeling for Simulation, Analysis, and Control eBooks & eLearning
Posted by AvaxGenius at Dec. 20, 2024
Vehicle-Manipulator Systems: Modeling for Simulation, Analysis, and Control by Pål Johan From , Jan Tommy Gravdahl , Kristin Ytterstad Pettersen
English | PDF (True) | 2014 | 402 Pages | ISBN : 1447154622 | 4.8 MB
Furthering the aim of reducing human exposure to hazardous environments, this monograph presents a detailed study of the modeling and control of vehicle-manipulator systems. The text shows how complex interactions can be performed at remote locations using systems that combine the manipulability of robotic manipulators with the ability of mobile robots to locomote over large areas.