Robotic Arm
Ros 6Dof Robotic Arm eBooks & eLearning
Posted by ELK1nG at May 22, 2024
Ros 6Dof Robotic Arm
Published 5/2024
MP4 | Video: h264, 1920x1080 | Audio: AAC, 44.1 KHz
Language: English | Size: 1.65 GB | Duration: 2h 38m
Published 5/2024
MP4 | Video: h264, 1920x1080 | Audio: AAC, 44.1 KHz
Language: English | Size: 1.65 GB | Duration: 2h 38m
blender,xacro,moveit
Ros 6Dof Robotic Arm eBooks & eLearning
Posted by ELK1nG at May 22, 2024
Ros 6Dof Robotic Arm
Published 5/2024
MP4 | Video: h264, 1920x1080 | Audio: AAC, 44.1 KHz
Language: English | Size: 1.65 GB | Duration: 2h 38m
Published 5/2024
MP4 | Video: h264, 1920x1080 | Audio: AAC, 44.1 KHz
Language: English | Size: 1.65 GB | Duration: 2h 38m
blender,xacro,moveit
Ros 6Dof Robotic Arm eBooks & eLearning
Posted by ELK1nG at May 22, 2024
Ros 6Dof Robotic Arm
Published 5/2024
MP4 | Video: h264, 1920x1080 | Audio: AAC, 44.1 KHz
Language: English | Size: 1.65 GB | Duration: 2h 38m
Published 5/2024
MP4 | Video: h264, 1920x1080 | Audio: AAC, 44.1 KHz
Language: English | Size: 1.65 GB | Duration: 2h 38m
blender,xacro,moveit
Parol6 Robotic Arm Unity Simulator With Matlab Control eBooks & eLearning
Posted by ELK1nG at April 4, 2024
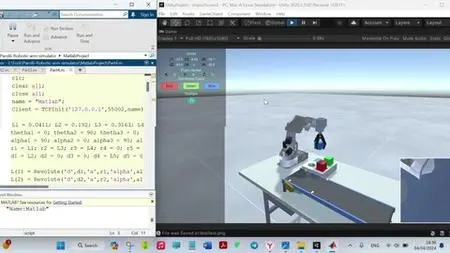
Parol6 Robotic Arm Unity Simulator With Matlab Control
Published 4/2024
MP4 | Video: h264, 1920x1080 | Audio: AAC, 44.1 KHz
Language: English | Size: 2.30 GB | Duration: 2h 3m
Published 4/2024
MP4 | Video: h264, 1920x1080 | Audio: AAC, 44.1 KHz
Language: English | Size: 2.30 GB | Duration: 2h 3m
parol6, robotics, unity, matlab
Robotic Arm Holding A Circuit Chip 1559044 Graphics
Posted by apoploman214 at Dec. 3, 2023
Robotic Arm In A Factory 1559039 Graphics
Posted by apoploman214 at Dec. 3, 2023
Arduino Sun Tracking,Robotic Arm eBooks & eLearning
Posted by Free butterfly at Dec. 20, 2021

Arduino Sun Tracking,Robotic Arm,Cell Phone Controlled Robot Car,propeller drove show,Automatic Plant Irrigation interesting projects for future enhancement by Anbazhagan K
English | November 10, 2019 | ISBN: 1707191158 | 165 pages | MOBI | 3.59 Mb
English | November 10, 2019 | ISBN: 1707191158 | 165 pages | MOBI | 3.59 Mb
ROS Ultimate guide for Custom Robotic Arms and Panda 7 DOF eBooks & eLearning
Posted by ELK1nG at May 20, 2022
ROS Ultimate guide for Custom Robotic Arms and Panda 7 DOF
MP4 | Video: h264, 1280x720 | Audio: AAC, 44.1 KHz
Language: English | Size: 2.13 GB | Duration: 4h 58m
MP4 | Video: h264, 1280x720 | Audio: AAC, 44.1 KHz
Language: English | Size: 2.13 GB | Duration: 4h 58m
Write ROS Controllers for Forward and Inverse Kinematics for Trajectory and Build Robotic Manipulators from Scratch
Robotic Grasping and Fine Manipulation eBooks & eLearning
Posted by AvaxGenius at June 28, 2024
Robotic Grasping and Fine Manipulation by Mark R. Cutkosky
English | PDF | 1985 | 190 Pages | ISBN : 1468468936 | 13.1 MB
When a person picks up a metal part and clamps it in the chuck of a lathe, he begins with his arm, proceeds with his wrist and finishes with his fingers. The arm brings the part near the chuck. The wrist positions the part, giving it the proper orientation to slide in. After the part is inserted, the wrist and fingers make tiny corrections to ensure that it is correctly seated. Today's robot attempting the same operations is at a grave disadvantage if it has to make all motions with the arm. The following work investigates the use of robotic wrists and hands to help industrial robots perform the fine motions needed in a metal working cell. Chapters 1 and 2 are an introduction to the field and a review of previous investigations on related subjects. Little work has been done on grasping and fine manipulation with a robot hand or wrist, but the related subjects of robot arm dynamics and control have an extensive literature.
Robotic Grasping and Fine Manipulation eBooks & eLearning
Posted by AvaxGenius at June 28, 2024
Robotic Grasping and Fine Manipulation by Mark R. Cutkosky
English | PDF | 1985 | 190 Pages | ISBN : 1468468936 | 13.1 MB
When a person picks up a metal part and clamps it in the chuck of a lathe, he begins with his arm, proceeds with his wrist and finishes with his fingers. The arm brings the part near the chuck. The wrist positions the part, giving it the proper orientation to slide in. After the part is inserted, the wrist and fingers make tiny corrections to ensure that it is correctly seated. Today's robot attempting the same operations is at a grave disadvantage if it has to make all motions with the arm. The following work investigates the use of robotic wrists and hands to help industrial robots perform the fine motions needed in a metal working cell. Chapters 1 and 2 are an introduction to the field and a review of previous investigations on related subjects. Little work has been done on grasping and fine manipulation with a robot hand or wrist, but the related subjects of robot arm dynamics and control have an extensive literature.